Overview
This workshop mainly focuses on how to use unmanned ground vehicle for building your own Robotic systems. Only the basic knowledge of computer programming languages is required for building unmanned ground vehicle. you do not have to be a geek for it! The workshop will start from the basics like designing layouts and building complex layouts. Once the basics of electronics & programming are done we will begin with building UGV The duration of this workshop will be one or two consecutive days, with eight hours session each day in a total of eight & sixteen hours, properly divided into theory and hand on practical sessions

Course Details
Introductory Session
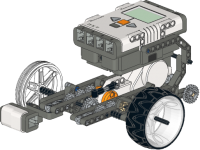
- What is Unmanned Ground Vehicle?
- Terrorist Attacks & Security Considerations
- Applications of UGVs
- Concept of UGVs and related machines
Design of Unmanned Ground Vehicles
- Armament Capabilities
- Countermeasures in various fields
- Mining Industry
- Bomb Disposal Squad
- Emergency Services & Safety Measures
- Guidance
- Teleported Capabilities
- Autonomous Capabilities
Basic Building Session of UGVs
- Electronics Components related to UGV Systems.
- Basic Circuit Modules like (Voltage Regulation, Motor Drivers etc.)
- Choosing the electronics components & assembly for purpose
- What are Integrated Circuits? Which ICs are commonly used and How?
- What are Photo sensors?
Software & Hardware Integration Session
- What is Microcontroller?
- Difference between microcontroller and microprocessor with live examples?
- Microcontroller Architecture and interfacing
- How can we use a microcontroller in our own circuits?
- Microcontroller Programming in 'C'
- Writing your First ‘C’ Program in AVR Studio
- Compilation and debugging
- Loading Compiled ‘C’ Program on a Microcontroller using AVR.
Autonomous Unmanned Vehicles (Part 1)
Development of Line Centered Guided Vehicle
- What is a LCG Vehicle
- Testing of LCG Vehicle on ground
- Optimization of Algorithm
- Development of a Infrared Sensored Device in edge detection
- Concept Development & Algorithm materialization
- Development of program with code optimization
Autonomous Unmanned Vehicles (Part 2)
Development of Anti Edge Detection through Infrared Sensing
- Object/Stone Detector Techniques
- Testing of LCG Vehicle on ground
- Optimization of Algorithm
Operating of UGVs using Cellular Phones from Master Control Center.
- DTMF Technology
- DTMF Encoders & Decoders
- Interfacing of DTMF ICs
- Concept and Algorithms
- Controlling of vehicle using cellular phone
Kit Details
Our Technologies